Iterative Hough Forest with Histogram of Control Points for 6 DoF Object Registration from Depth Images
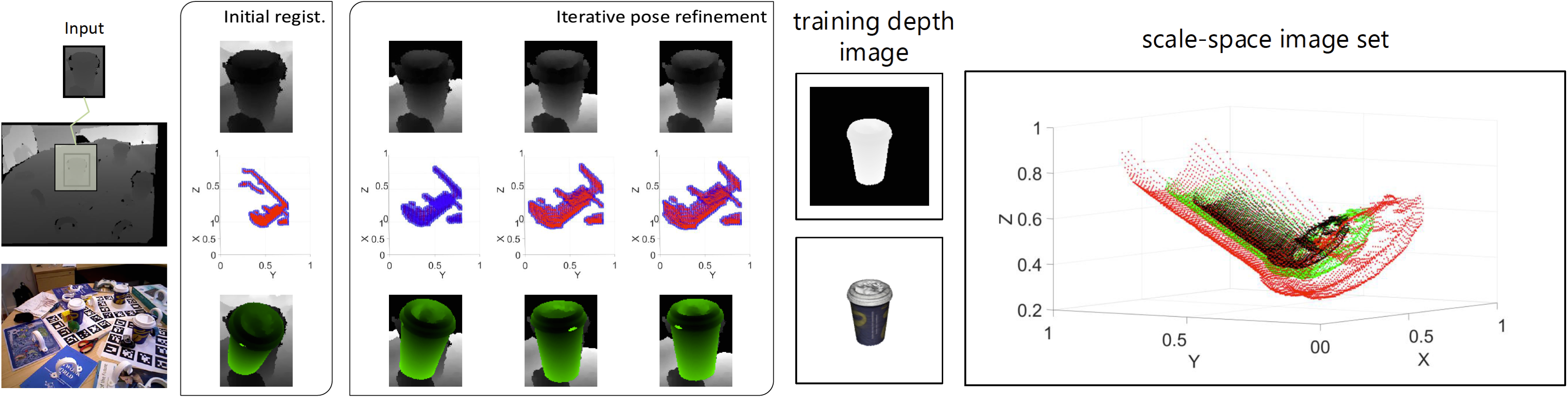 |
State-of-the-art techniques for 6D object pose recovery depend on occlusion-free point clouds to accurately register objects in the 3D space. To reduce this dependency, we introduce a novel architecture called Iterative Hough forest with Histogram of Control Points that is capable of estimating occluded and cluttered objects' 6D pose given a candidate 2D bounding box. Our iterative Hough forest is learnt using patches extracted only from the positive samples. These patches are represented with Histogram of Control Points (HoCP), a scale-variant implicit volumetric description, which we derive from recently introduced Implicit B-Splines (IBS). The rich discriminative information provided by this scale-variance is leveraged during inference, where the initial pose estimation of the object is iteratively refined based on more discriminative control points by using our iterative Hough forest. We conduct experiments on several test objects of a publicly available dataset to test our architecture and to compare with the state-of-the-art.
Contributions
- To the best of our knowledge this is the first time we adapt an implicit object representation, Implicit B-Spline, into a scale-variant patch descriptor and associate with the random forests.
- We introduce a novel iterative algorithm for the Hough forests: it finds out an initial hypothesis and improves its confidence iteratively by extracting more discriminative scale-variant descriptors due to the elimination of the background/foreground clutter.
Results
 |
Downloads
Dataset We used the one available in Latent-Class Hough Forests
Contact
For any inquiries or feedback please contact:
- Caner Sahin [E-Mail] [Homepage]
- Rigas Kouskouridas [E-Mail] [Homepage]
- Tae-Kyun Kim [E-Mail] [Homepage]